
大模型机器视觉新突破SAM进化版SAV来了:分割一切视频!开源!
- 2026-04-15 17:27:00
- miadmin 原创
- 12
SAM模子之以是正在谋略机视觉范畴出现紧急影响,是由于图像豆割是很众职分中的根柢步调,例如主动驾驶、人脸识别、车牌识别等都有效到。
正在这些操纵进程中,从目的检测、豆割再到识其余总共流程,由算法主动竣事,无需人工过问,而SAM模子恰是专攻此中的图像豆割。
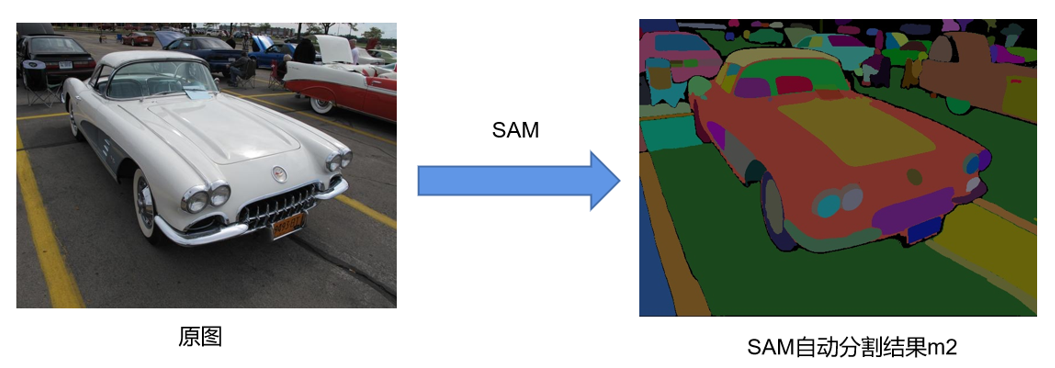
3.它存正在太过豆割的题目,时常把一个完好的物体豆割成差别的片面,而人是把目的行动团体对付的。
现正在,云创数据(835305.BJ)正在SAM和YOLOv8的根柢上,“豆割总共”模子的进化版——豆割总共视频Segment-Any-Video(SAV)来了,进一步丰裕了谋略机视觉劳绩。
同时,基于Zero-Shot Transfer(零样本迁徙),SAV无需异常锻练,假使是锻练库中没有的图片,也可能完毕轻松豆割。
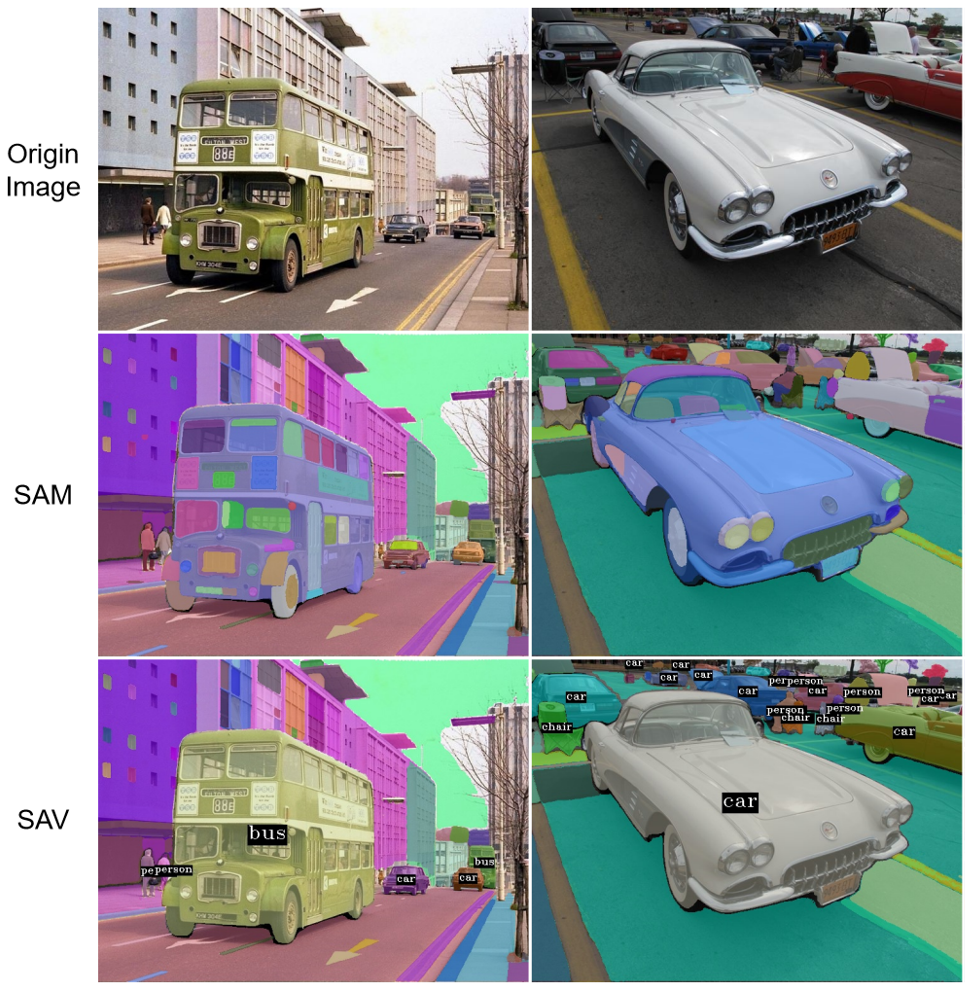
从上图可能看出,SAV将巴士、小汽车等豆割成一个个完好的区域,而SAM是把这些单个的物体又豆割为差别的区域。

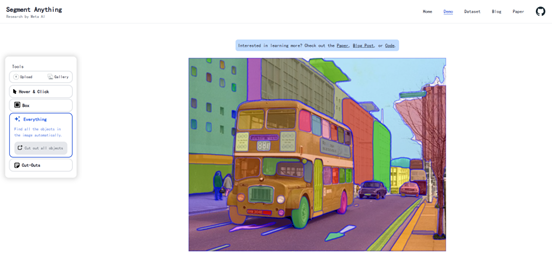
正在首页可随便选拔一张示例图片,也可从当地上传图片,然后点击Segment按钮,就可能同时获得SAM和SAV的结果。
正在上图中,由SAV豆割的两只小狗是完好而独立的色块,并不像左边豆割结果所揭示——小狗耳朵颜色和身体片面颜色纷歧,不是完好的目的对象。同时,SAV豆割的两只小狗都打上了“dog”的标签。
须要评释的是,本项目只眷注算法主动豆割的操纵场景,以是SAV无需人工输入点、弧线、矩形框等提示音讯。
如前所述, SAM的主动豆割不返回标签音讯,而且一个实例(比如,一辆车)恐怕会被拆分成众个小区域。
基于此,研发团队正在SAM的根柢上参与YOLOv8检测模子,YOLOv8返回的结果中包蕴目的框、种别及置信度,目的框可行动提示音讯输入到SAM,种别名称即为标签,是以SAM加YOLOv8可有用地处置上述题目。
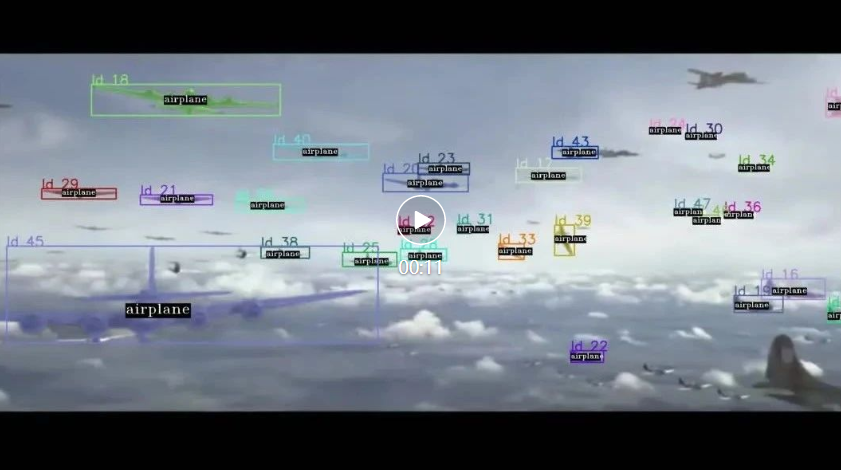
该办法同样可用于视频豆割职分,与管制单幅图像差别的是,除了豆割,咱们普通更合切目的的运动轨迹、目的重识别,以及若何完毕一键抠视频等。是以研发团队正在SAM和YOLOv8的根柢上参与跟踪算法,连续眷注感风趣的目的,云云比简单地豆割每帧图像更有实质意旨。
探究到操纵了目的检测模子,正在跟踪方面,研发团队选拔Tracking-By-Detection(TBD) 范式的跟踪办法,比如BoTSORT,而TBD是目前众目的跟踪职分中独特有用的范式。
操纵YOLOv8做前向推理,取得n个目的框,将这n个目的框行动提示音讯输入到SAM模子并推理,即可竣事目的框的实例豆割而且获得n个对应的掩膜,然后对这n个掩膜取并集,结果记为m。

因为YOLOv8无法检测到它不行识其余物体,可能成立两个超参数来确定新的物体,即未知区域与检测区域的交并比r,以及未知区域的像素个数n。整个而言,按面积对m2中的区域作降序排序,按序取出此中的区域,然后分歧与m谋略交并比,若交并比r小于0.3且该区域的像素个数n大于100,则以为该区域是一个新的物体。服从此办法管制m2中的统统区域,即可竣事SAV豆割单幅图像的扫数流程。
无人驾驶。特斯拉无人驾驶汽车时常会把树桩或者墓碑当成行人,这个对付无人驾驶来说是晦气的,由于倘使是电线杆子正在途边的话,咱们没需要让无人驾驶汽车减速,但倘使是一个行人盘算过马途的话,那么就须要预先作出管制。SAV可能有用地处置这种题目。
无人机自立飞翔。无人机自立飞翔正在密林中或者修筑物中,须要对统统的目的实行识别,而且做出得当的响应。SAV将大大提升这种智能程度。
呆板人视觉。呆板人行走正在工场或者街上的功夫,倘使不认得攻击物,不认得道途,不认得其他挪动的物体,那将寸步难行。SAV将为呆板人装上聪敏的眼睛。
重心区域防护。可连绵追踪和识别每个目的,连结其他的算法对目的的身份和行径实行识别。确珍重心区域的的每一个别,每一辆车都正在管控的畛域内。
云创数据是处于软件和音讯技能效劳行业的高新技能企业,针对爆炸式伸长的大数据人工智能需求,公司研发了具有自立学问产权的 “智能存储平台”、“大数据管制平台”和“人工智能云平台”三大平台,并正在此根柢上以 算法天生模子,由模子验证算法,研发出可能不停自我优化的“核默算法+模子库”智能成 长形式,行动企业技能中枢才能。最终,修建出具有特质和逐鹿力的中枢产物系统,面向差别墟市范畴客户供应完好的大数据存储与智能处领会决计划,酿成了自底而上的大数据人工智能全家当链架构。
| 联系人: | 王先生 |
|---|---|
| 微信: | 1735252255 |
| 地址: | 沈阳市铁西区兴华南街58-6号 |
-
思陌产品
深度学习系统产品介绍 -
使用帮助
使用手册 -
关于我们
公司简介 -
资讯反馈
交流论坛 -
联系我们
Tel 15640228768 QQ/WX技术支持 1735252255
